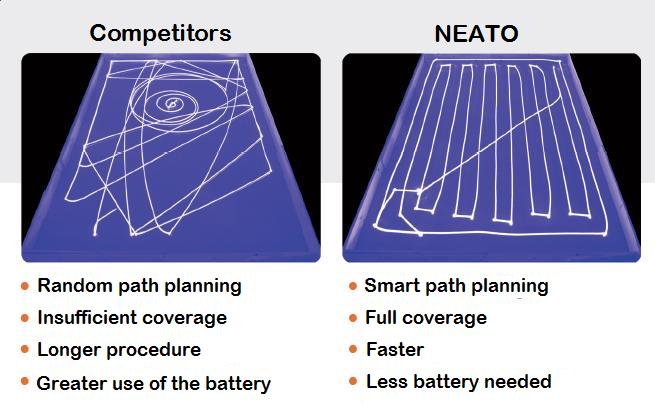
| Same here - we got a Neato one and I'd end up just standing there watching it. Totally fascinating - more than once I even got it out to show to people visiting! n:) The Neato ones are a bit more methodical - they have a simple time-of-flight rotating laser sensor that does some SLAM-style stuff to map out the room which means it can do long continuous back-and-forth paths across the room (random image I found that explains it nicely: https://www.generationrobots.com/img/cms/Navigation-Algorith...) It has a charging base thing - it has a special pattern of stripes (kinda like a barcode I guess) behind a human-opaque panel that it uses to locate the charger. While it was nice to just set the thing off and leave it to do its thing, it is not without problems though: - it would very happily suck-up and chew cables or errant socks etc, and/or push low stuff around in front of it (e.g shoes). You had to spend time picking up phone charging cables and shoes etc before starting. - it was not very accurate when it came to working around slanted chair/table legs (since its laser beam would only pick a point approx 5cm off of the ground, it would often hit the lower part of the leg that was in its path but that it could not see) - it would often get stuck "under" things since there was about 1.5cm of extra height above the laser, and it feels like a lot of IKEA furniture is all just high enough for it to drive under and get wedged because it could not see it. - it would sometimes get stuck in situations where there was a very tight space between two things (e.g. dining chair and a wall)but where in theory it was wide enough for it to drive down - it would end up trying to reverse out, but actually managing to reverse into the wall and jack its self up so the wheels lost traction. - it does not know if it has "missed" something or done a good job, so often stubborn bits of fluff don't get picked up. We've now had to retire ours because we got new carpets and it seems to get stuck a lot on the new carpet that is a bit thicker, often doing wheel spins for 30 seconds at a time. This seems to really confuse the SLAM algo since after it regains traction it ends up just driving straight into walls and stuff, despite having a laser sensor to tell it there was a wall there ... I guess it used some sort of encoding from its wheels as input too (perhaps as a effort to ignore "unexpected" laser returns - e.g. perhaps intended to ignore people pets when it has already mapped a room?) We've replaced it with a dyson cordless stick vacuum thing with a wall-charger-dock thing. It doesn't take that much longer to do it by hand when you factor in the prep-time (picking up cables, moving dining chairs away from the table, moving things far away out from the wall etc etc), rescuing stuck robot time, or manual pick-ups of things it missed required afterwards, and then moving all of your chairs etc back into position. It is also nice to not have to bend down so much to move the robot one around, or empty its dustbin. |
{kind=link}