|
|
|
|
|
|
by dllu
2641 days ago
|
|
|
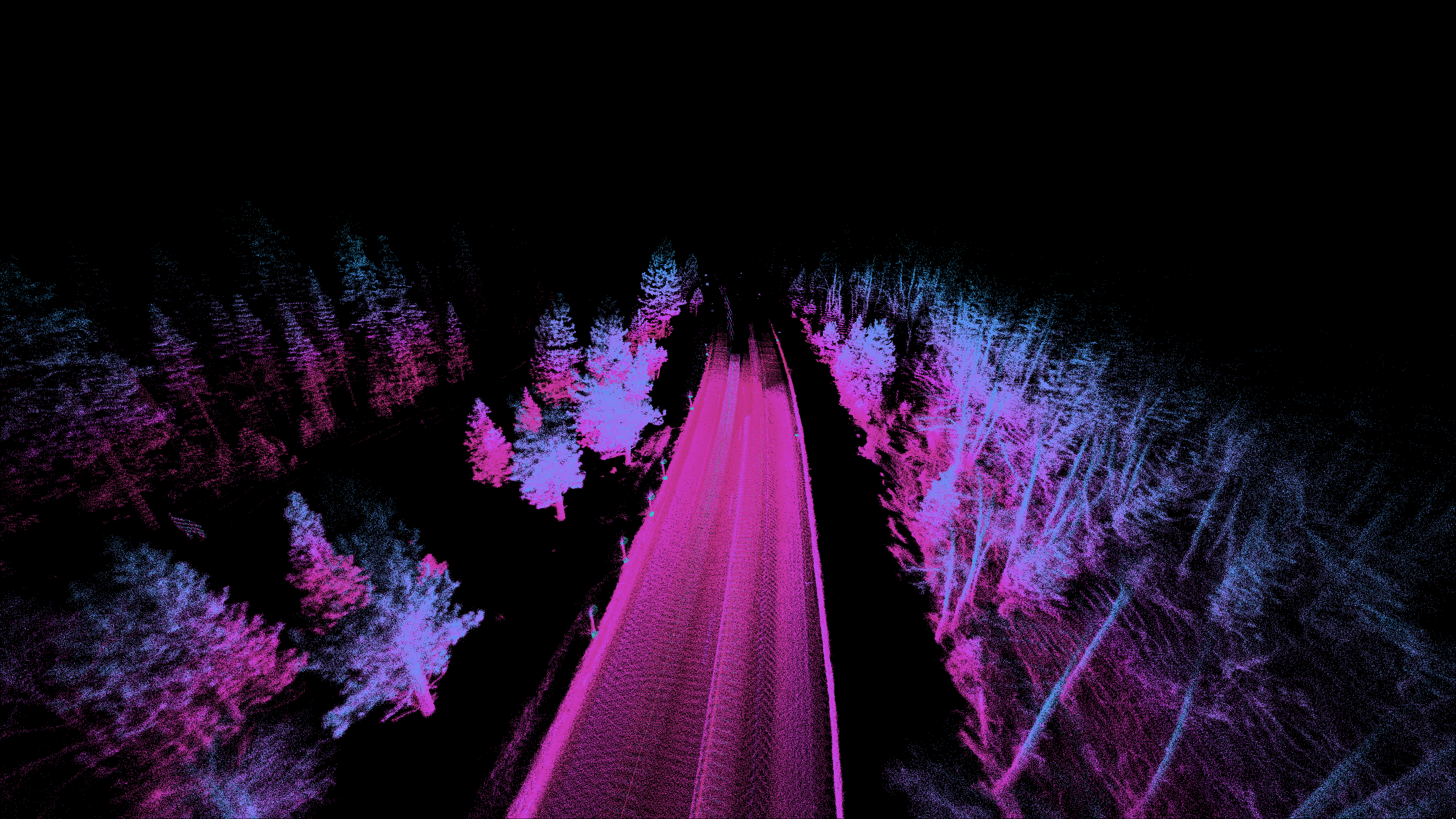
Ouster SLAM works okay in a forest environment, such as driving with one Ouster OS-1 at highway speeds in Tahoe [0]. It is definitely much more challenging than an urban environment full of flat planes and right angles. Calibration, including range biases, is probably the one factor with the greatest impact on mapping quality. For example, range bias may cause curved walls, and beam angle biases may cause curved ground. I recall that the top scoring lidar SLAM algorithms on the KITTI data set all had to perform some calibration (for example, J. E. Deschaud found that all the beams on the Velodyne HDL-64E were tilted by 0.22 degrees [1]). The Ouster OS-1 lidars have a slight range bias for highly reflective objects [2] but this will be fixed in a firmware update in the near future. [0] https://pics.dllu.net/file/dllu-sc/6beea0708a.png
[1] https://arxiv.org/abs/1802.08633
[2] https://www.ouster.io/s/OS-1-Datasheet.pdf |
|
|
{kind=link}